MIT Self Driving Race Car Ultra Sonic Sensor Test
Hey Steemians , This is another video in the MIT Race Car Series project.
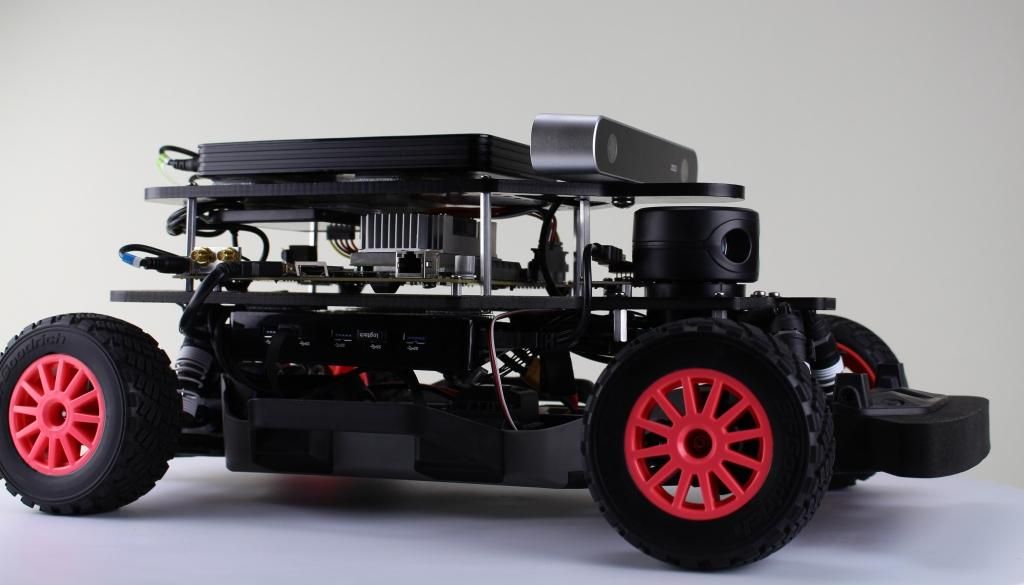
In this Video we carried out a few preliminary tests to test the movements by using depth sensors and Zed Camera.
If you would like to configure your car just like the one you see in the video i would recommend following this Guide .
Hardware Tested In this Video

The reason why we use the ZED camera is because it enables Real-time 3D Mapping which is essential in identifying objects and thereby enabling the robot in making smart decisions.You may find some other Camera's which may work just as well but this was the equipment provided to us for completing this project.
All the Code written for Testing Depth Sensing is included on the Github Repository here .We used Python for implementing these sensors as there are a collection of default Libraries in python which will make our life easier.
For starter's you will require the following imports to use the PyZedCamera
import pyzed.camera as zcam
import pyzed.defines as sl
import pyzed.types as tp
import pyzed.core as core
After importing all the required libraries you can now create an Object of type PyZEDCamera and use all the additional features of PyZedCamera
zed = zcam.PyZEDCamera()
Now You may initialize the depth mode and and specify the depth measurements required.
init_params = zcam.PyInitParameters()
init_params.depth_mode = sl.PyDEPTH_MODE.PyDEPTH_MODE_PERFORMANCE # Use PERFORMANCE depth mode
init_params.coordinate_units = sl.PyUNIT.PyUNIT_MILLIMETER # Use milliliter units (for depth measurements)
Finally here is the code which will allow your robot to assess depth in various images and overwrite the Electronic speed controller thereby enabling your bot to make smart decisions
# Open the camera
err = zed.open(init_params)
if err != tp.PyERROR_CODE.PySUCCESS:
exit(1)
# Create and set PyRuntimeParameters after opening the camera
runtime_parameters = zcam.PyRuntimeParameters()
runtime_parameters.sensing_mode = sl.PySENSING_MODE.PySENSING_MODE_STANDARD # Use STANDARD sensing mode
i = 0 #counter
image = core.PyMat()
depth_for_display = core.PyMat()
print('Current mode: Capture {} images as fast as possible.\nMerge the images.\nSave to pickle files.'.format(num_images))
while i < num_images:
# JOYSTICK
pygame.event.pump() # keep everything current
throttle = (j.get_axis(throttle_axis)+1)/2 # left stick
steering = (j.get_axis(steering_axis)+1)/2 # right stick steering
left_bumper = j.get_button(left_bumper) # left bumper is deadman/ controls whether you are saving
exit_button = j.get_button(exit_axis) # Options button exits
if exit_button:
print('Exit button (options) pressed. Stopping data collection')
break
if left_bumper:
# A new image is available if grab() returns PySUCCESS
if zed.grab(runtime_parameters) == tp.PyERROR_CODE.PySUCCESS:
# Retrieve left image
zed.retrieve_image(image, sl.PyVIEW.PyVIEW_LEFT)
# Retrieve left depth
zed.retrieve_image(depth_for_display,sl.PyVIEW.PyVIEW_DEPTH)
#convert to arrays
data=image.get_data()
depth_data=depth_for_display.get_data()
# Convert images to smaller square images
square_image_size=500
data=cv2.resize(data,(square_image_size,square_image_size))
depth_data=cv2.resize(depth_data,(square_image_size,square_image_size))
merged = merge_images(data,depth_data)
print('writing dataset/image_{0}_{1:.4f}_{2:.4f}.pickle'.format(i,throttle,steering))
if (i%25==0):
print('{} images have been captured'.format(i))
pickle.dump(merged,open( 'dataset/image_{0}_{1:.4f}_{2:.4f}.pickle'.format(i,throttle,steering), 'wb' ))
else:
print('image collection failed')
# Increment the loop
i = i + 1
j.quit()
print('Image capture complete')
# Close the camera
zed.close()
Hope you enjoyed this post, feel free to reach out if you would like to replicate this project or have any questions regarding this project.
▶️ DTube
▶️ IPFS
Wow will this work with any camera?
Unfortunately no, only cameras which enable Depth Sensing and allow you to map 3D Environments.These cameras are usually more developer friendly as well and would have pre-built libraries.You can have a look at some of the cameras here.
Oh hell 449$ for such camera.. SO I think this camera is only suitable for the use of designing a surreal graphic of games, or some geologist will use this kind of camera. So your university provided this? Are you really from Massachusetts Institute of Technology?
Yeah its pretty pricey for a camera ,I am actually not sure what else they might be used for i know they work best with a LIDAR for creating self driving car's.
Yeah My university provided us with all the resources for this project and MIT provided us with the base code for this project.No I am not from MIT, I studied at University Of Sydney this was my final year project.
Good post
Thanks a lot
Cool post...really interesting stuff.
No one realizes how close to a reality autonomous self-driving vehicles really is
True, there are a few hurdles but the tech seems to be expanding at an exponential rate.
Very cool man.
Cheers bud, glad you enjoyed it.
This post has received a 10.38 % upvote from @chronocrypto thanks to: @ajkapss.
The code looks really nicely formatted, but I don't read it, not jet! =)
Cool project by the way!
Hahahah Thanks glad you found it fun.
Congratulations! This post has been upvoted from the communal account, @minnowsupport, by ajkapss from the Minnow Support Project. It's a witness project run by aggroed, ausbitbank, teamsteem, theprophet0, someguy123, neoxian, followbtcnews, and netuoso. The goal is to help Steemit grow by supporting Minnows. Please find us at the Peace, Abundance, and Liberty Network (PALnet) Discord Channel. It's a completely public and open space to all members of the Steemit community who voluntarily choose to be there.
If you would like to delegate to the Minnow Support Project you can do so by clicking on the following links: 50SP, 100SP, 250SP, 500SP, 1000SP, 5000SP.
Be sure to leave at least 50SP undelegated on your account.