CINEMATICA DIRETTA e INVERSA - 🤖ROBOT SCARA🤖
Ciao a tutti Steemians! Oggi vi propongo un contenuto tecnico ma molto interessante.
Anzitutto vi introduco i robot Scara, tipicamente a 3/4 assi, sono robot largamente utilizzati nell'industria soprattutto per applicazioni di tipo pick and place. Sono molto usati perchè economici, semplici nella loro struttura e molto consolidati.

Per essere programmati bisogna comunicargli le posizioni che l'end effector (la mano del robot che esegue le manipolazioni) deve raggiungere e quelle intermedie, ad esempio per un pick and place bisogna dirgli il punto di prelievo, la traiettoria da seguire e il punto di rilascio.
E il problema qua dove sta? La principale problematica da risolvere sta nel fatto che è relativamente semplice ottenere la posizione dell'end effector a partire dalle coordinate dei motori servo (cinematica diretta), ma è molto più difficile il contrario (cinematica inversa): ottenere le coordinate angolari dei motori (alfa,beta) a partire da una posizione (x,y) dell'end effector; che è quello richiesto nella maggiorparte delle applicazioni in cui si dice al robot dove andare e le coordinate dei motori devono essere calcolate di conseguenza.
Nell'esempio del robot scara la sua cinematica diretta risulta: 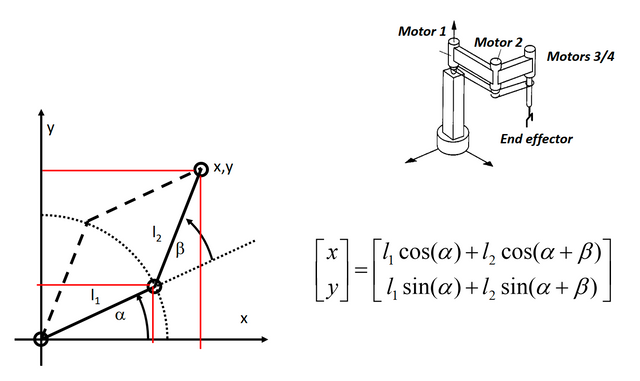
Mentra il calcolo di quella inversa è molto più complicato, e per robot con più gradi di libertà e più complessi dello scara (che è uno dei più semplici) risulta quasi impossibile, vengono infatti preferiti algoritmi di calcolo che trovano una soluzione approssimata rispetto a quella teorica esatta.
TUTTI i robot quindi, quando vengono programmati e messi in funzione, si muoveranno seguendo delle posizioni molto vicine a quelle indicate nel programma, ma non perfettamente uguali, mantenendo un errore di posizione contenuto.
