OmniXtreme - Open-source hyperhuman control framework for Unitree G1
OmniXtreme
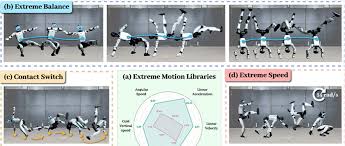
Open-source hyperhuman control framework for Unitree G1
Screenshots
Hunter's comment
OmniXtreme is an open-source control framework pushing humanoids to hyperhuman limits. It perfectly balances generative Flow Matching for extreme motion planning with strict physical envelope clipping to prevent mid-air motor burnouts.
Link
https://extreme-humanoid.github.io/?ref=producthunt

This is posted on Steemhunt - A place where you can dig products and earn STEEM.
View on Steemhunt.com
Congratulations!
We have upvoted your post for your contribution within our community.
Thanks again and look forward to seeing your next hunt!
Want to chat? Join us on: