Diagramas cartesianos de desplazamiento y aplicación al principio de los trabajos virtuales
Saludos estimados lectores, bienvenidos a esta nueva publicación referente a la Estática Aplicada. Esta vez se aborda un procedimiento de gran utilidad en el estudio de sistemas materiales: los diagramas cartesianos de desplazamiento. Para mayor alcance en la lectura de este contenido es recomendable la revisión del siguiente artículo, ya que este tema está basado en la representación gráfica de los movimientos infinitésimos en sistemas materiales de 1 grado de libertad (1 GL).
• Análisis por movimiento infinitésimo de sistemas materiales de 1 grado de libertad
A pesar de abordar el estudio del movimiento de mecanismos cinemáticos, este procedimiento gráfico se ha vuelto parte esencial de la Estática Aplicada (plan de estudios de la asignatura) en la carrera de Ingeniería Civil en la Universidad Central de Venezuela, debido a su aplicabilidad en el cálculo de reacciones en sistemas isostáticos. El material de referencia disponible respecto a este tema es bastante limitado, por ello la elaboración de esta publicación.
→ Material completo de Estática Aplicada
Introducción
El análisis por movimiento infinitésimo de sistemas materiales de un (1) grado de libertad (1 GL) consiste en estudiar el comportamiento inestable (o la desplazabilidad) de los mismos mediante el cálculo del desplazamiento de cada uno de sus puntos y la rotación de cada chapa en función a una rotación arbitraria “α” asignada a una de las mismas. Dicha rotación es de orden infinitesimal. En la publicación referida a dicho procedimiento se realizó este análisis a un sistema material de solo dos chapas.
Este puede resultar ser un procedimiento bastante complicado si nos encontramos con una gran cantidad de chapas (cuerpos rígidos o eslabones) y además un arreglo complejo de vinculaciones externas e internas. Por ello, la implementación de un diagrama que describa la desplazabilidad del sistema material de 1 GL es una herramienta de gran valor práctico, ya que permite de igual forma, en función de una rotación inicial de orden infinitesimal, calcular los desplazamientos de todos los puntos del sistema, así como también las rotaciones de cada una de las chapas de forma gráfica, pero sin dibujar la deformada del sistema sobre su imagen original, lo cual puede dificultar su entendimiento. De esta manera, el movimiento del sistema material de 1 GL se puede describir a través de un diagrama construido exteriormente al mismo.
Pero ¿de que sirve describir el movimiento de un sistema de 1 GL en la ESTÁTICA APLICADA mediante un diagrama? Los diagramas cartesianos de desplazamiento son una herramienta de gran valor práctico para realizar el cálculo de reacciones en sistemas materiales isostáticos, es decir, sistemas estables de cero (0) grados de libertad sometidos a un sistema de cargas externas, pero no a través de las ecuaciones de equilibrio estático, sino a través del Principio de los Trabajos Virtuales para Cuerpos Rígidos, en el cual el sistema isostático estable se convierte en un “mecanismo virtual equivalente” de 1 GL para así calcular el trabajo virtual que las cargas externas realizarían sobre este sistema equivalente y compatibilizarlo con el sistema original para así determinar la reacción deseada, sea esta una fuerza lineal o un momento flector. De la Física sabemos que el Trabajo realizado por una fuerza es el producto de la misma por el desplazamiento que esta genera en su punto de aplicación, y resulta evidente que los desplazamientos de este “mecanismo equivalente de 1 GL” deben ser determinados con exactitud para poder realizar el cálculo de la reacción deseada, de allí la aplicabilidad de los diagramas cartesianos de desplazamiento en la Estática Aplicada.
Fundamentos matemáticos
Repasando los fundamentos matemáticos del movimiento infinitésimo, nos referiremos a una chapa con 1 GL en el plano, la cual experimenta una rotación de orden infinitesimal “α” alrededor del polo “O” tal como se representa en la Figura N°1. Sobre dicha chapa se encuentra un punto “P”.
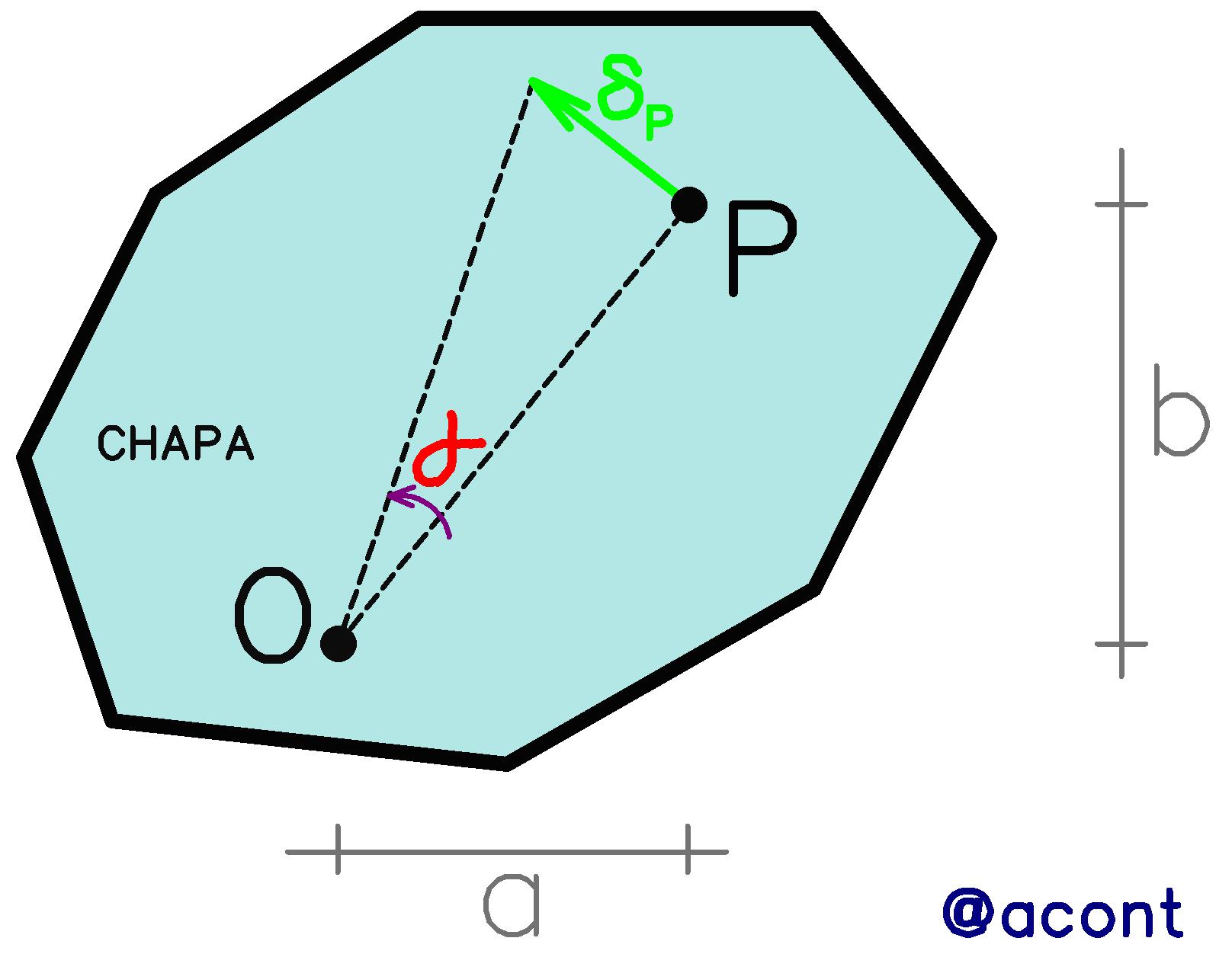
El punto “P” presenta desplazamiento perpendicular al radio vector que une el polo “O” con dicho punto. Tal como se observa en la Figura N°1, este desplazamiento está en una dirección inclinada y se requiere conocer la magnitud de las componentes horizontal y vertical de dicho desplazamiento. Para ello nos basaremos en la propiedad dada continuación por parte de Hernández (1998):
”…una rotación infinitésima es una transformación biunívoca del plano…por efecto de la cual todos los puntos experimentan corrimientos en una misma dirección. Todo punto situado sobre la vertical de i tendrá el mismo desplazamiento vertical debido a que tienen la misma abscisa; de igual forma, todo punto situado sobre la horizontal de i tendrá el mismo corrimiento horizontal”. (p. 48).
Lo anteriormente explicado por el Prof. Suilio Hernández indica que en la chapa dada en la Figura N°1, todo punto situado vertical a “P” tendrá la misma componente de desplazamiento vertical, y de manera análoga, todo punto horizontal a “P” tendrá la misma componente de desplazamiento horizontal que dicho punto. Esto nos conduce a cierta simplificación. De manera gráfica, podemos determinar las componentes horizontal y vertical del desplazamiento del punto “P” como se ilustra en la Figura N°2.
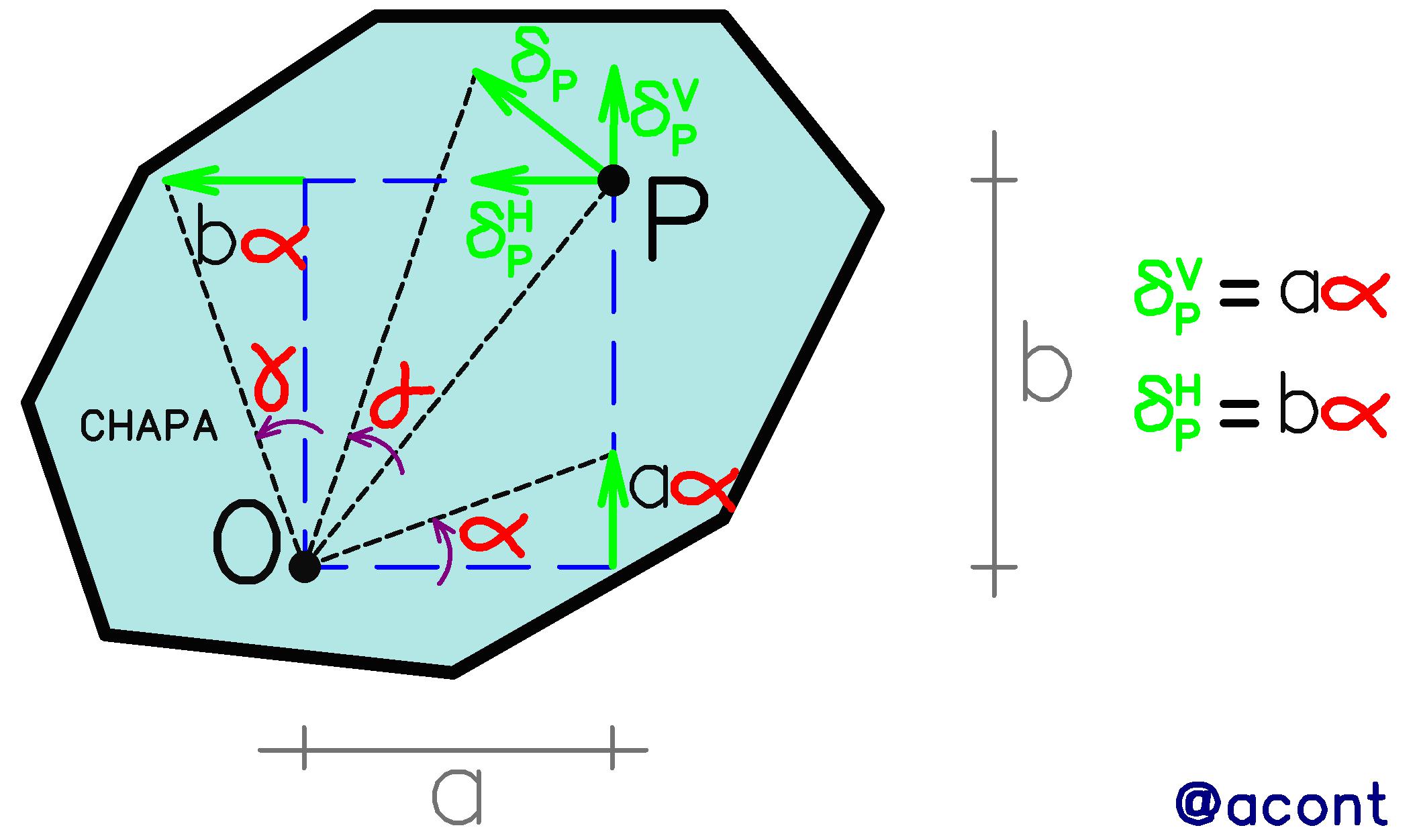
El ángulo “α” al ser de magnitud infinitésima se asume igual a su tangente. Lo que esto quiere decir es que la magnitud de cada componente del desplazamiento de un punto “P” depende de la magnitud del ángulo de rotación de la chapa y de la distancia en horizontal o en vertical entre el punto “P” y el polo “O” de dicha chapa. Esto coincide con lo expresado por Rodríguez (2003):
Los Desplazamientos horizontales son proporcionales al ángulo de Rotación multiplicado por la diferencia de distancia vertical entre el Punto "P” y el Polo de la Chapa…Los Desplazamientos verticales son proporcionales al ángulo de Rotación multiplicado por la diferencia de distancia horizontal entre el Punto "P” y el Polo de la Chapa”. (p. 53).
Sin embargo, el objetivo es representar gráficamente la magnitud y dirección de estos desplazamientos. Luego de un breve repaso de las bases matemáticas movimiento infinitésimo podemos establecer el modelo matemático de los diagramas cartesianos de desplazamiento.
Trazado de los diagramas cartesianos para una chapa de 1 GL en el plano
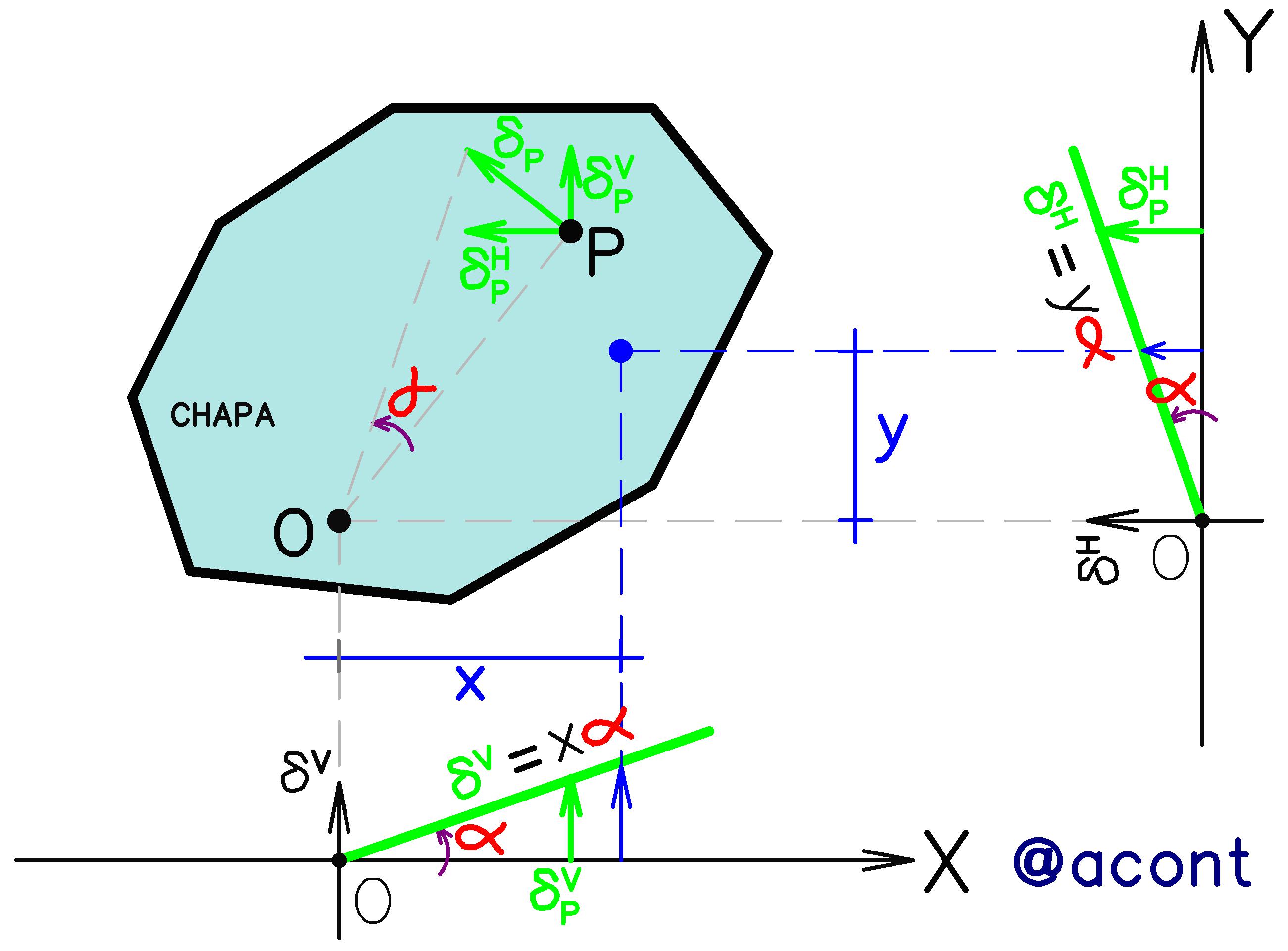
Primero debemos notar que ya conocido el ángulo de rotación “α”, la magnitud del desplazamiento horizontal o vertical del punto “P” depende de que tan alejado se encuentre dicho punto del polo “O”. Por lo tanto, para cualquier punto alejado una distancia horizontal “x” y una distancia vertical “y” del polo “O” podemos escribir lo siguiente:
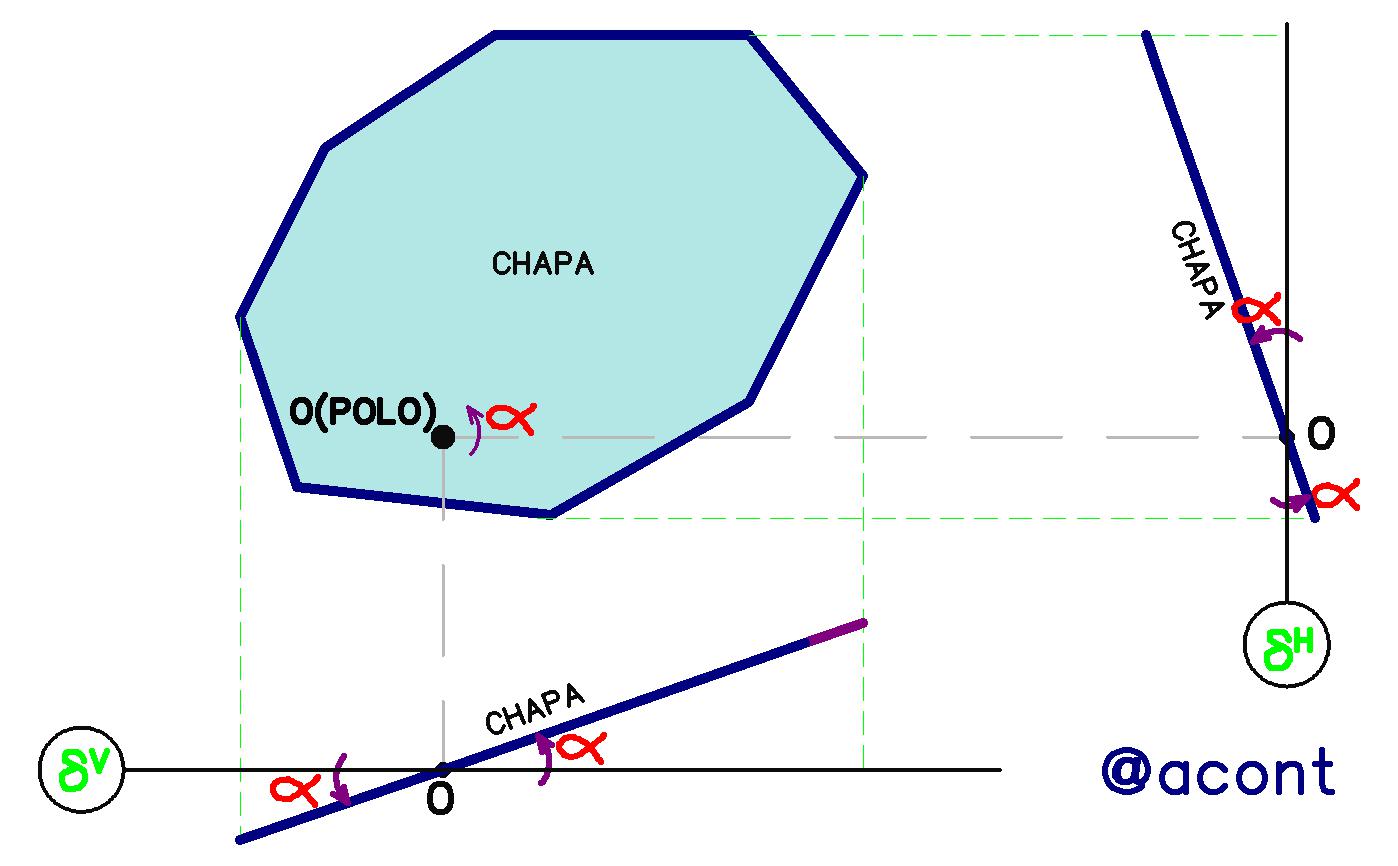
El signo de la ecuación depende del sentido que se le asigne a la rotación “α”. Dichas ecuaciones representan rectas que podemos graficar alrededor de un par de ejes perpendiculares entre sí. La abscisa de dichos gráficos cartesianos representa la magnitud del desplazamiento horizontal o vertical. Ahora, el origen de este par de gráficos se encuentra en la proyección del polo “O” sobre dichos ejes (Figura N°3).
Desde luego, debe existir correlación entre los diagramas cartesianos, de manera que el ángulo de rotación de una chapa debe tener la misma magnitud y sentido en ambos, de lo contrario ambos diagramas representan movimientos totalmente diferentes.
Por último, los diagramas cartesianos de desplazamiento deben de tener un dominio finito o límite en los valores “x” y “y” de dichas rectas. Estos límites son determinados por la proyección total de dichas chapas sobre los ejes cartesianos, es decir, los diagramas cartesianos de desplazamiento de una chapa se trazan hasta el último punto de una chapa que pueda presentar movimiento (Figura N°4).
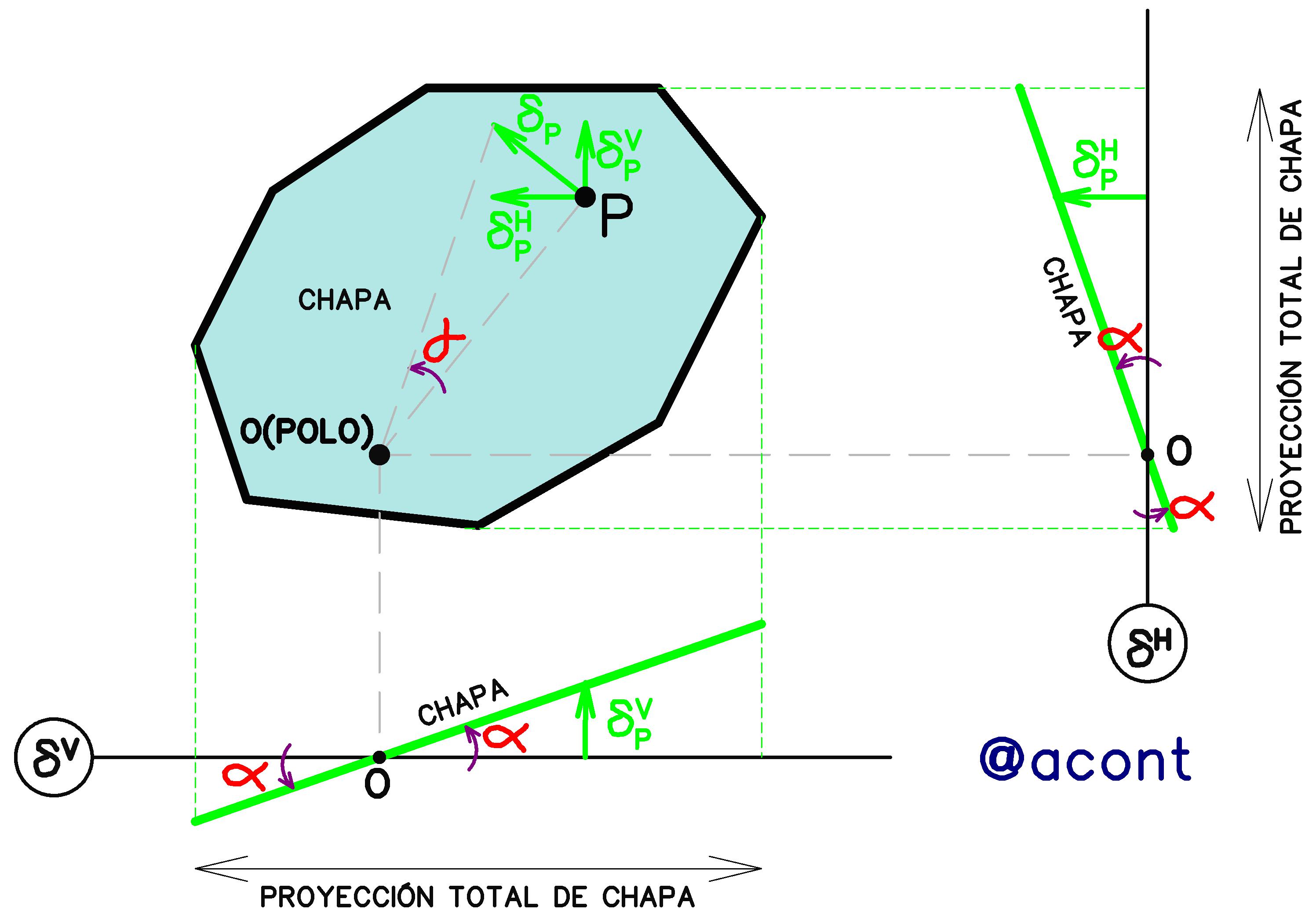
De esta manera, representamos gráficamente el desplazamiento de todos los puntos de una chapa que rota alrededor de un polo “O” sobre dos ejes cartesianos mediante una recta que “gira” alrededor de la proyección del polo.
En resumen, debemos conocer primero el polo de la chapa para saber en qué punto la recta corta con el eje cartesiano (punto de desplazamiento nulo y rotación pura). Sobre la proyección de dicho polo en los diagramas cartesianos se traza una recta cuyo ángulo respecto al eje cartesiano sea la rotación conocida de dicha chapa en el sentido asignado.
Caso particular: traslación pura de una chapa.
Anteriormente vimos una chapa cuyo único grado de libertad se describía mediante una rotación, en este caso, el grado de libertad es dado por una traslación o desplazamiento puro. Por consiguiente, los desplazamientos de todos los puntos de la chapa presentan desplazamiento de igual magnitud y sentido, por lo que el polo de dicha chapa se encontrará en el infinito en dirección perpendicular al desplazamiento. Dada una chapa que presenta traslación pura en dirección inclinada (Figura N°5), podemos observar que todos los puntos presentan la misma componente horizontal y vertical de desplazamiento.
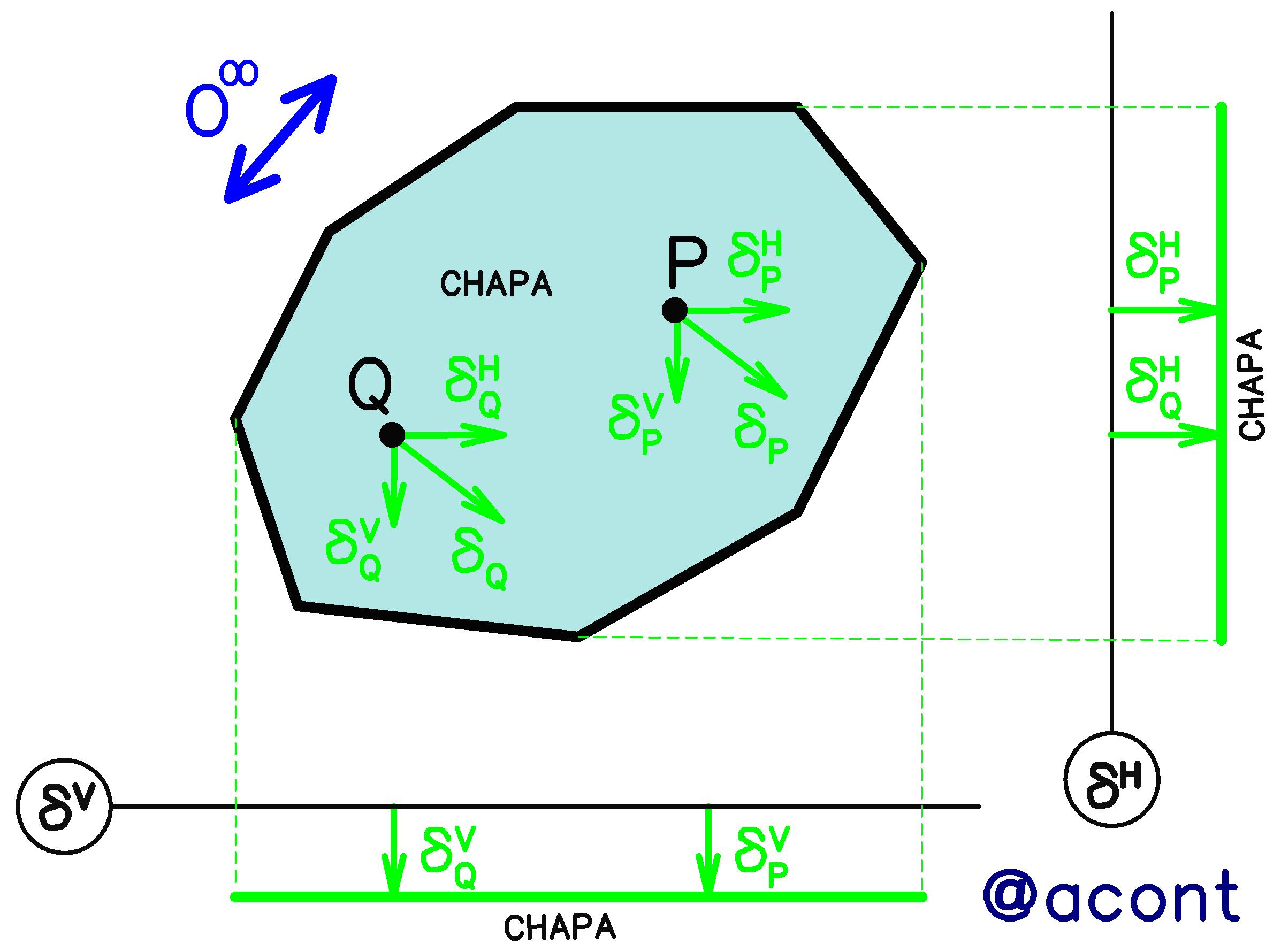
En consecuencia, al ser nula la rotación, los diagramas cartesianos de desplazamiento de la chapa serán dados por rectas totalmente paralelas a los ejes cartesianos, ya que todos los puntos de la misma se desplazan exactamente igual. No habrá punto de corte con dichos ejes porque no existe un punto de rotación fijo como en el caso anterior, es decir, no hay punto que presente desplazamiento nulo y rotación pura.
La ecuación de la recta será una constante para ambos diagramas y la magnitud de dicha constante depende de la magnitud del desplazamiento total.
Particularidades del trazado de los diagramas cartesianos
Asumiendo que es conocido el ángulo de rotación de la chapa o el desplazamiento de esta, podemos encontrar ciertos casos particulares del trazado de los diagramas cartesianos.
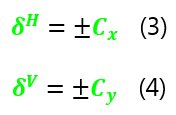
Chapa que se proyecta como un punto sobre uno de los ejes. Si nos vamos al modelo de barras unidimensionales como chapas, puede presentarse lo que se ve en la Figura N°6.
Al estar la chapa dispuesta de manera totalmente horizontal o vertical, se proyectará como un punto sobre uno de los ejes cartesianos. Si la chapa rota, deberá notarse su rotación mediante líneas discontinuas. Al proyectarse como un punto sobre un eje cartesiano, ningún punto de la chapa presenta desplazamiento perpendicular a este.
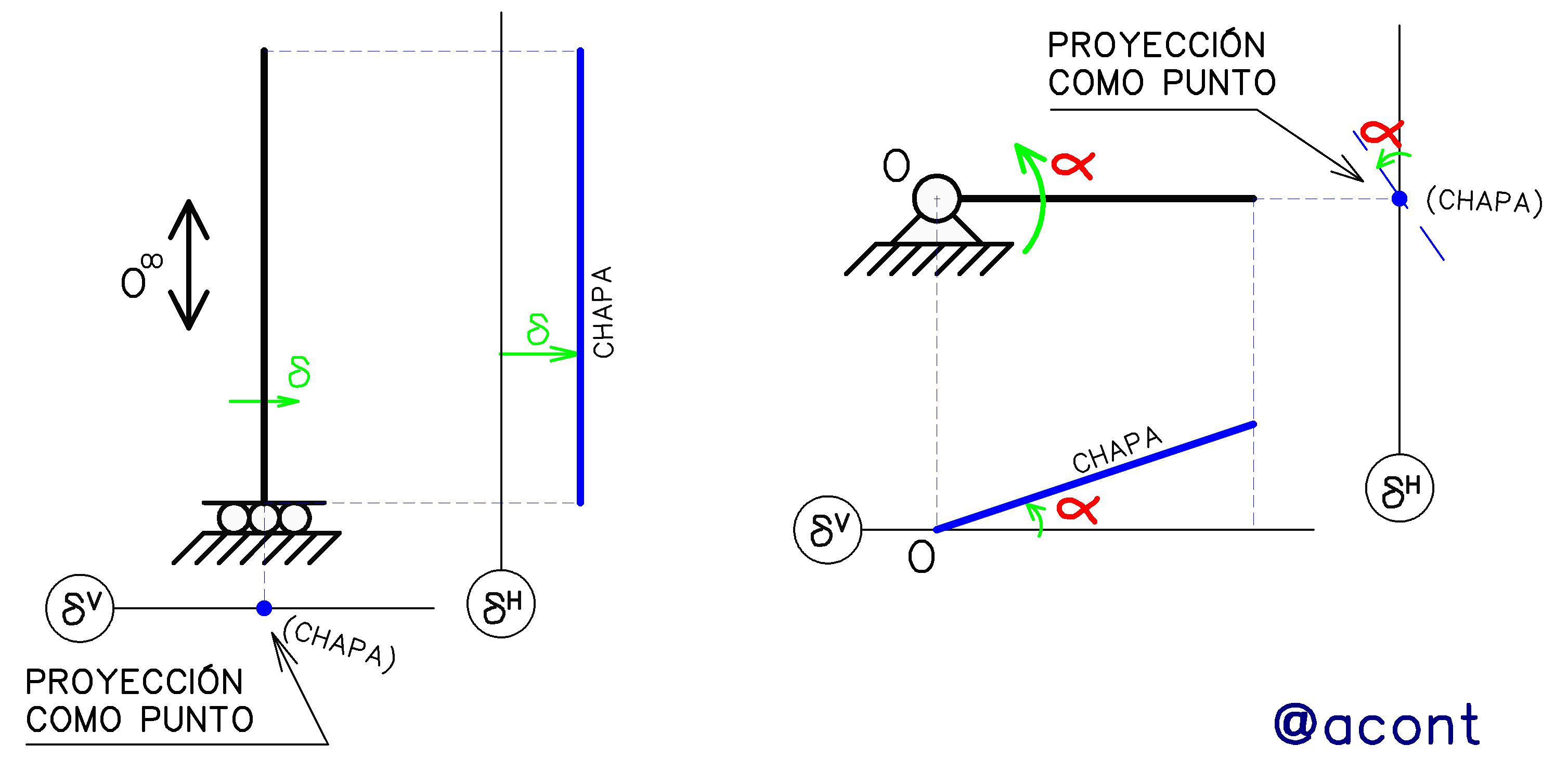
Chapa con traslación pura horizontal o vertical.
La ecuación de los diagramas cartesianos serán como las ecuaciones (3) y (4).
Tal como se observa en la Figura N°7, si la chapa se traslada de manera horizontal, se podrá ver su desplazamiento paralelo al eje cartesiano vertical, pero al ser nulo su desplazamiento vertical, su proyección coincide con el eje cartesiano horizontal. Tal como se observa, la forma de la chapa no incide en la forma en que se representa en los diagramas cartesianos, ya que estos siempre serán rectas.
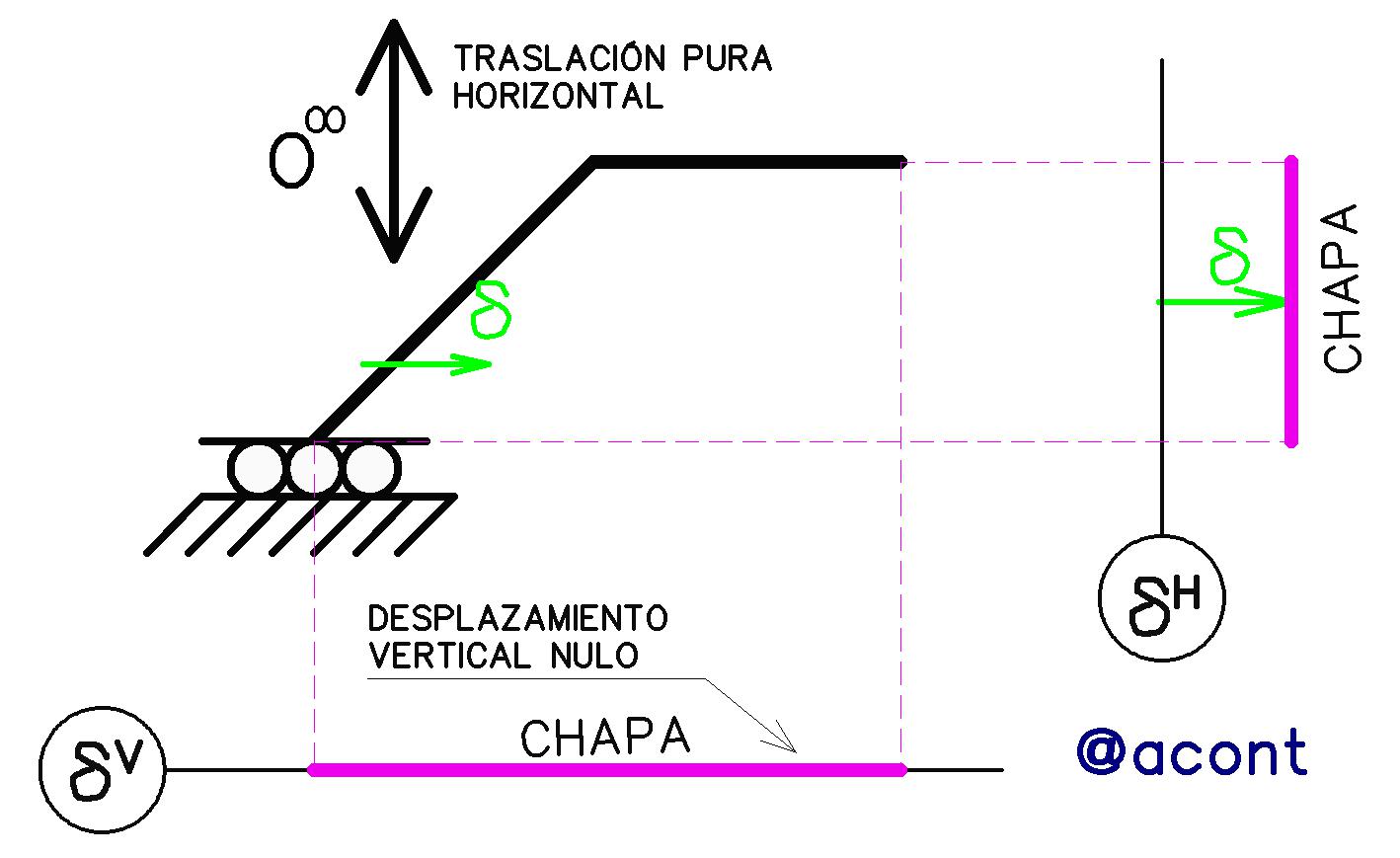
Chapa cuyo polo se encuentra fuera de su proyección. Este es el caso mostrado en la Figura N°8.
De igual forma, el movimiento de la chapa se representa a partir de la proyección del polo sobre ambos ejes cartesianos mediante rectas que forma un ángulo conocido con dichos ejes (similar a las ecuaciones (1) y (2)). Esta recta empieza en la proyección del polo y termina en el último punto proyectable de la chapa. No obstante, dicha recta se representa de manera continua únicamente dentro de los límites proyectables de dicha chapa sobre los ejes cartesianos. El resto de la recta se representa de manera discontinua.
Chapa que no se mueve. Si una chapa no presenta movimiento, su representación en los diagramas cartesianos es nula (no existe). La chapa debe poseer 1 GL expresado a través de una rotación infinitésima o una traslación pura de pequeño orden.
Ejemplo básico de aplicación al Principio de los Trabajos Virtuales para Cuerpos Rígidos
El principio de los trabajos virtuales para cuerpos rígidos será abordado con mayor profundidad en un futuro artículo, pero en la presente publicación se demuestra la aplicabilidad de esta herramienta para el cálculo de recciones en un sistema isostático sometido a cargas externas.
En la Figura N°9 se muestra una chapa isostática estable (GL=0) simplemente apoyada mediante una articulación fija a tierra en “A” y un “patín” en “B”. Está sometida a una carga puntual de 45 N verticalmente hacia abajo en la mitad y un momento flector de 30 N-m en sentido horario en el extremo “B”.
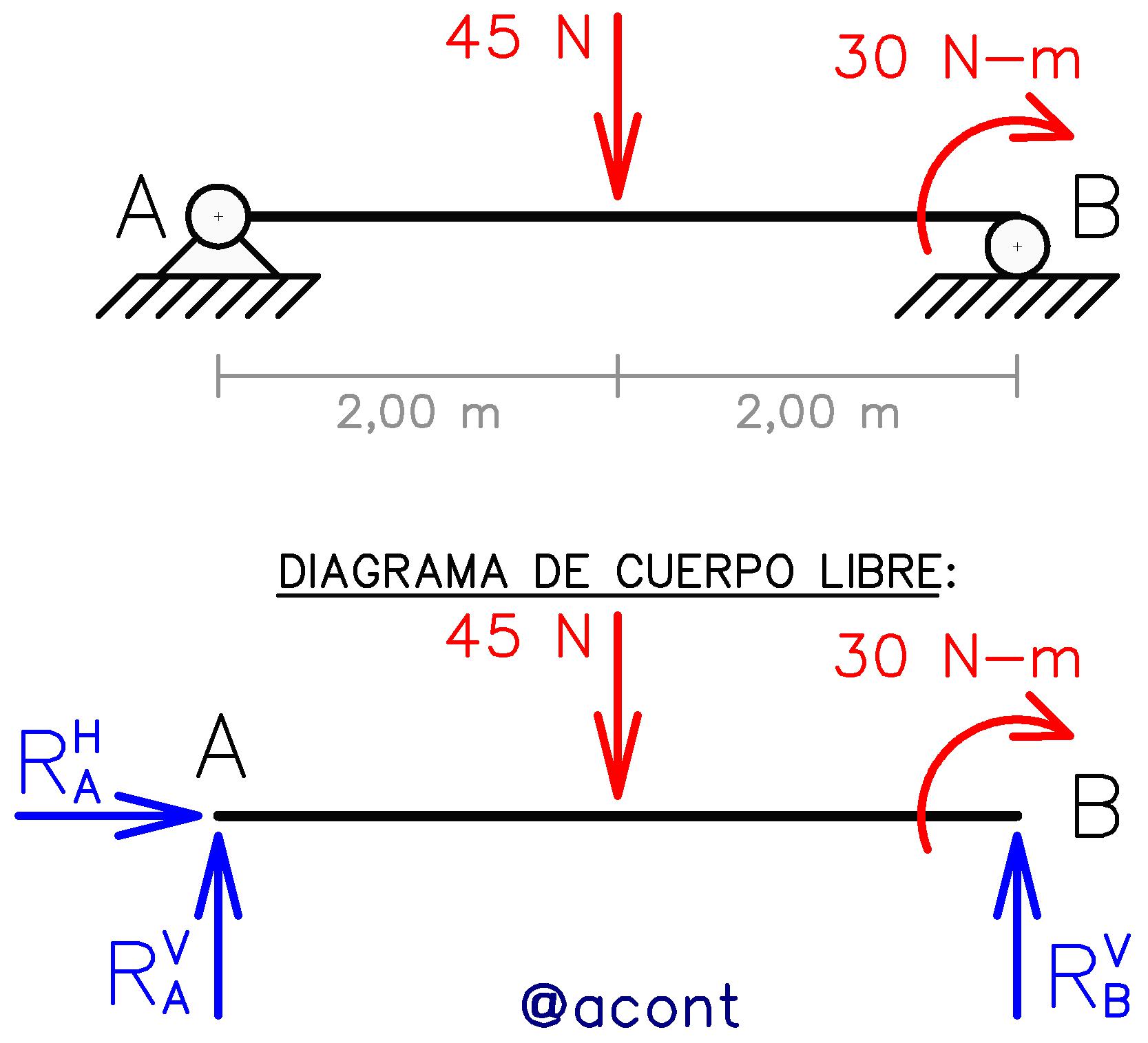
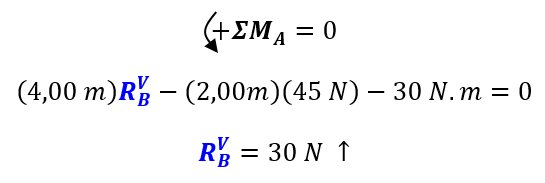
El objetivo es determinar la reacción vertical del apoyo “B” producto de estas cargas externas. Si aplicamos las ecuaciones de equilibrio estático, mediante sumatoria de momentos en “A” podemos despejar la reacción vertical de “B”.
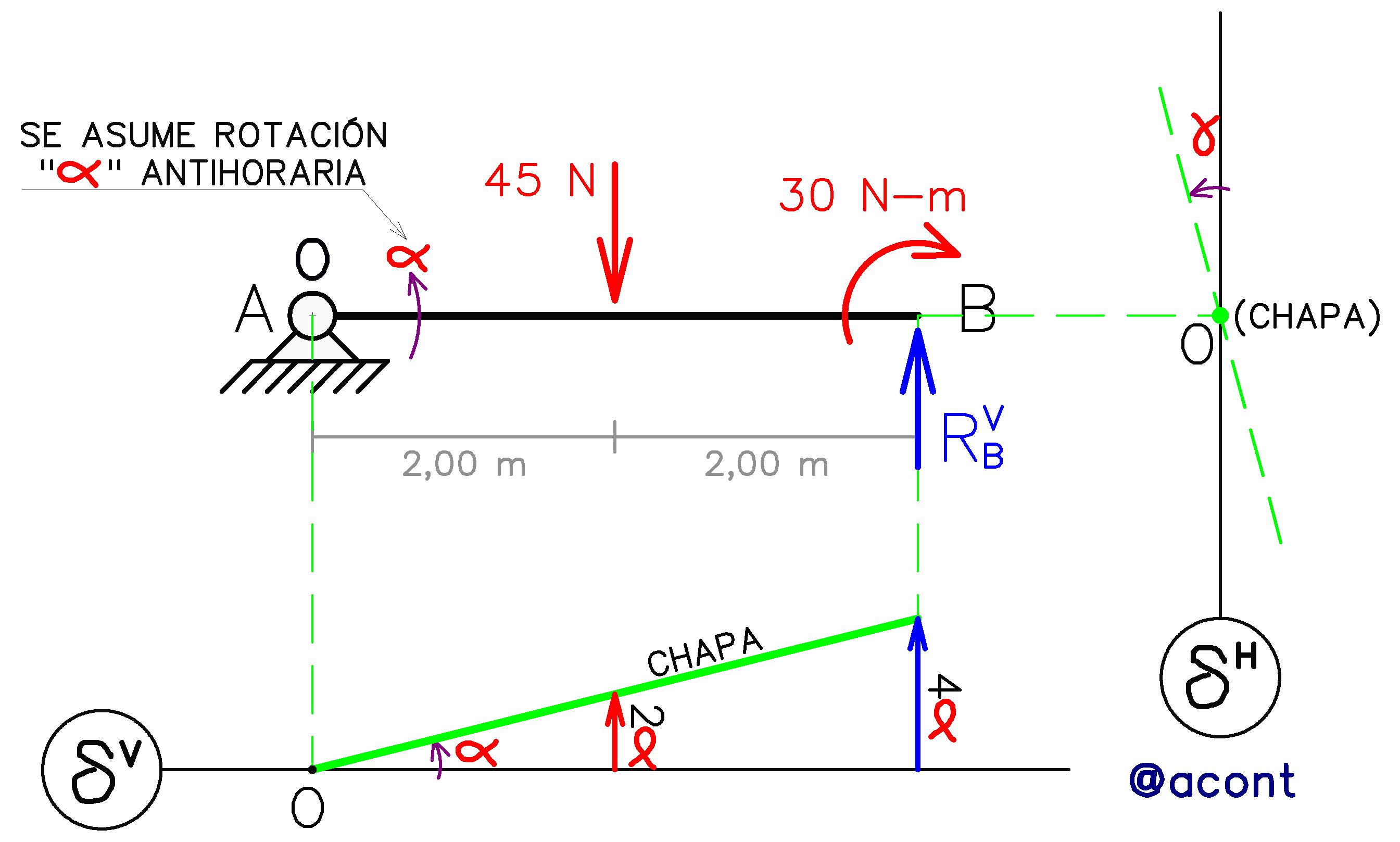
Mediante el principio de los trabajos virtuales para cuerpos rígidos, tendríamos que convertir el sistema original estable en un sistema de 1 GL (inestable) que permita el desplazamiento asociado a la reacción deseada. Este “sistema virtual equivalente” presentará desplazabilidad. Como resultado, podemos determinar los diagramas cartesianos de dicho sistema, adicionando a su vez la reacción incógnita a ser calculada (Figura N°10). La chapa del sistema virtual presenta rotación, por lo que la ecuación de sus diagramas cartesianos será de la forma de las ecuaciones (1) y (2).
El trabajo de una fuerza es igual a el producto escalar de esta por el desplazamiento en su punto de aplicación en dirección a la misma. Ya que siempre trabajaremos con las componentes horizontal y vertical de las fuerzas y los desplazamientos, para efectos prácticos podemos decir que: si la fuerza y el desplazamiento poseen igual sentido, el trabajo será positivo, de lo contrario será negativo. Para el caso del trabajo realizado por el momento flector sucede lo mismo, solo que en este caso con la rotación de la chapa.
En consecuencia, nos interesa la magnitud y sentido del desplazamiento del punto de aplicación de la fuerza de 45 N y de la reacción incógnita, así como la magnitud y sentido de la rotación de la chapa (Figura N°10). De esta manera podemos aplicar la sumatoria de trabajos del sistema virtual.
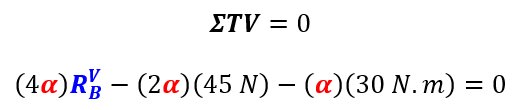
El trabajo realizado por la fuerza de 45 N será negativo porque el desplazamiento en su punto de aplicación tiene sentido contrario. El momento flector también realiza un trabajo de signo negativo porque la rotación de la chapa tiene sentido opuesto al mismo. La reacción vertical de “B” tiene el mismo sentido que el desplazamiento de la chapa en dicho punto, por lo que su trabajo será positivo:

Ya que el sistema real no se mueve, debemos compatibilizar esta sumatoria de trabajos con el mismo igualándola a cero, para de esta manera encontrar el valor de la reacción vertical de “B” que genere un trabajo total nulo en el sistema virtual.
El valor de “α” se cancela, llegando así al mismo resultado para la reacción vertical de “B”.
De esta manera tenemos una herramienta alternativa al cálculo de reacciones mediante ecuaciones de equilibrio estático. Cabe destacar que mediante el principio del trabajo virtual solo podremos calcular una reacción a la vez. En la próxima publicación se abordará la realización de los diagramas cartesianos de desplazamiento en sistemas materiales conformados por dos o más chapas vinculadas entre sí.
Conclusiones
Referencias Bibliográficas
•Hernández, Suilio. (1998). Estática Aplicada. Folleto Editado por el Departamento de Ingeniería Estructural U.C.V. Caracas.Fuente
•Rodríguez, Iván. (2003). Estática de las Estructuras.Fuente
•Trabajo (Física) de Wikipedia, la enciclopedia libre.Fuente
Material recomendado
•@acont. ESTÁTICA APLICADA: análisis por movimiento infinitésimo de sistemas materiales de 1 grado de libertad
Imágenes y ecuaciones de autoría propia realizadas mediante LibreCAD y Microsoft Word. Gif creado mediante Microsoft PowerPoint.
@tipu curate
Upvoted 👌 (Mana: 15/30 - need recharge?)
Grazie! @girolamamoratta saluti
This post has been voted on by the SteemSTEM curation team and voting trail. It is elligible for support from @curie and @minnowbooster.
If you appreciate the work we are doing, then consider supporting our witness @stem.witness. Additional witness support to the curie witness would be appreciated as well.
For additional information please join us on the SteemSTEM discord and to get to know the rest of the community!
Thanks for having used the steemstem.io app and included @steemstem in the list of beneficiaries of this post. This granted you a stronger support from SteemSTEM.
Gracias #steemstem #stem-espanol #curie